 Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Autor: Szymon Borys, ppłk dr inż. Wojciech Kaczmarek, Jarosław Panasiuk
Wydawnictwo: Wydawnictwo Naukowe PWN
Stron: 284
Data wydania: 2017-09-08
Typ: książka
Druk: tak
Wersja elektroniczna: nie
ISBN:
978-8-30-119395-9
08-09-2017
16.5 x 23.5 cm
nie
nie
nie
To pierwsza książka przygotowana przez wydawnictwo naukowe PWN z cyklu ROBOTYKA, wprowadzająca Czytelnika w arkana nowoczesnej wiedzy dotyczącej jednej z najbardziej rozwijających się technologii XXI wieku.
Podręcznik zatytułowany Środowiska programowania robotów zapozna Czytelnika z charakterystyką dostępnych na rynku wirtualnych środowisk programowania robotów – ze szczególnym uwzględnieniem środowisk oferowanych przez takie firmy, jak: ABB, FANUC, KUKA i MITSUBISHI.
Materiał przedstawiony w książce pozwoli na poznanie zasad korzystania ze środowisk oraz zasad tworzenia i symulowania pracy zrobotyzowanych stanowisk produkcyjnych.
Książka ze względu na praktyczność i sposób przekazu kierowana jest nie tylko do studentów automatyki i robotyki czy mechatroniki, ale również do praktyków – programistów robotów, integratorów automatyki, inżynierów i wielu innych.
Wstęp
1. Wprowadzenie do środowisk do programowania robotów przemysłowych w trybie offline/online
1.1. RobotStudio firmy ABB
1.2. Roboguide firmy FANUC
1.3. K-Roset firmy Kawasaki
1.4. MELFA WORKS firmy Mitsubishi Electric
1.5. KUKA.Sim Pro firmy KUKA
1.6. EPSON RC + 7.0 firmy EPSON
1.7. RoboSim Pro firmy Comau Robotics
1.8. Podsumowanie
2. Opis środowisk do programowania robotów w trybie offline wybranych firm
2.1. Środowisko RobotStudio firmy ABB
2.1.1. Layout – opis zakładek i konfiguracja środowiska RobotStudio
2.1.2. Układy współrzędnych w RobotStudio
2.1.3. Pakiety dodatkowe środowiska RobotStudio
2.1.4. Tworzenie stanowiska roboczego w środowisku RobotStudio firmy ABB
2.1.5. Tworzenie programu w środowisku RobotStudio
2.1.6. Współpraca środowiska RobotStudio z rzeczywistym robotem
2.2. Pakiet MELFA WORKS firmy Mitsubishi Electric
2.2.1. Layout – opis zakładek i konfiguracja MELFA WORKS
2.2.2. Układy współrzędnych w MELFA WORKS i RT ToolBox2
2.2.3. Tworzenie stanowiska roboczego w pakiecie MELFA WORKS
2.2.4. Tworzenie programu w pakiecie MELFA WORKS
2.2.5. Współpraca pakietu MELFA WORKS z rzeczywistym robotem
2.3. Środowisko Roboguide firmy FANUC
2.3.1. Layout – opis zakładek i konfiguracja środowiska Roboguide
2.3.2. Pakiety dodatkowe środowiska Roboguide
2.3.3. Tworzenie stanowiska roboczego w środowisku Roboguide
2.3.4. Tworzenie programu w środowisku Roboguide
2.3.5. Współpraca środowiska Roboguide z rzeczywistym robotem
2.3.6. Nowa wersja środowiska Roboguide V9
2.4. Środowisko KUKA.Sim Pro firmy KUKA
2.4.1. Layout – opis zakładek i konfiguracja środowiska KUKA.Sim Pro
2.4.2. Układy współrzędnych w środowisku KUKA.Sim Pro
2.4.3. Tworzenie stanowiska roboczego w środowisku KUKA.Sim Pro
2.4.4. Tworzenie programu w środowisku KUKA.Sim Pro
2.4.5. Nowa wersja KUKA.Sim Pro
2.5. Środowisko COSIMIR firmy EF-Robotertechnik GmbH
2.5.1. Layout – opis zakładek i konfiguracja środowiska COSIMIR
2.5.2. Układy współrzędnych w środowisku COSIMIR
2.5.3. Pakiety dodatkowe środowiska COSIMIR
2.5.4. Tworzenie stanowiska roboczego w środowisku COSIMIR
2.5.5. Tworzenie programu w środowisku COSIMIR
2.6. Środowisko Visual Components
2.6.1. Layout – opis zakładek i konfiguracja środowiska Visual Components
2.6.2. Układy współrzędnych w środowisku Visual Components
2.6.3. Tworzenie stanowiska roboczego w środowisku Visual Components
2.6.4. Tworzenie programu w środowisku Visual Components
3. Analiza porównawcza wybranych środowisk do programowania robotów
3.1. Wersje oprogramowania oraz sposoby ich dystrybucji
3.2. Kompleksowość środowiska
3.3. Możliwość importu plików z systemów CAD
3.4. Mechanizm odzwierciedlania rzeczywistości podczas przeprowadzania symulacji
3.5. Tworzenie programów w dedykowanym języku oraz możliwość ich modyfikacji
3.6. Odzwierciedlenie panelu nauczania
3.7. Praca w trybie online z rzeczywistym robotem .
4. Wnioski
5. Bibliografia
W naszym serwisie możesz złożyć zapytanie do wielu firm.
Zapytanie możesz wysłać bezpośrednio do firmy lub o wybrany produkt a nawet całą kategorię produktów.
Poniżej w kilku krokach pokazujemy jak wysłać zapytanie.

1. Skorzystaj z wyszukiwarki wpisując czego szukasz.
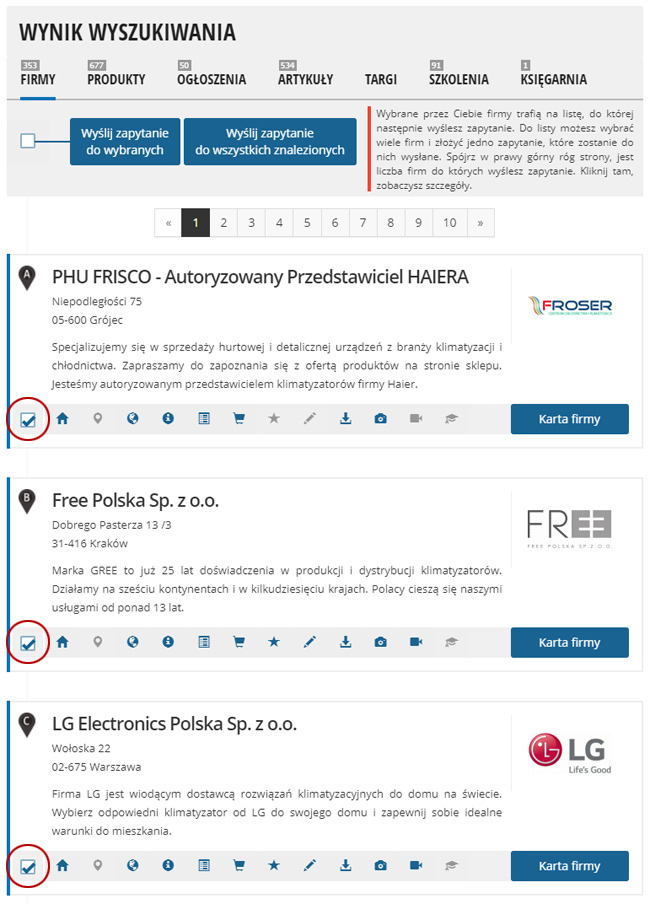
2. Zaznacz na liście wyniku wyszukiwania wybrane pozycje.
Możesz także wejść bezpośrednio do katalogu firm lub katalogu produktów i dokonać wyboru.

3. Twój wybór będzie pokazany w górnym pasku portalu. Najedź myszką i kliknij.
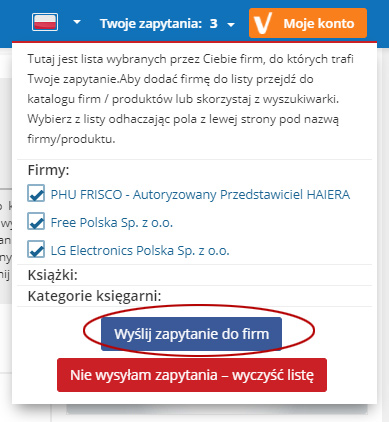
4. Następnie kliknij przycisk „Wyślij zapytanie do firm”.
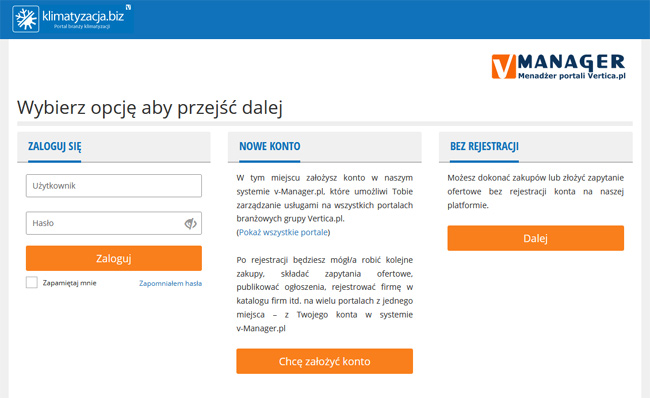
5. Jeżeli nie jesteś zalogowany to włączy się strona z możliwością wyboru w jaki sposób chcesz korzystać z serwisu.
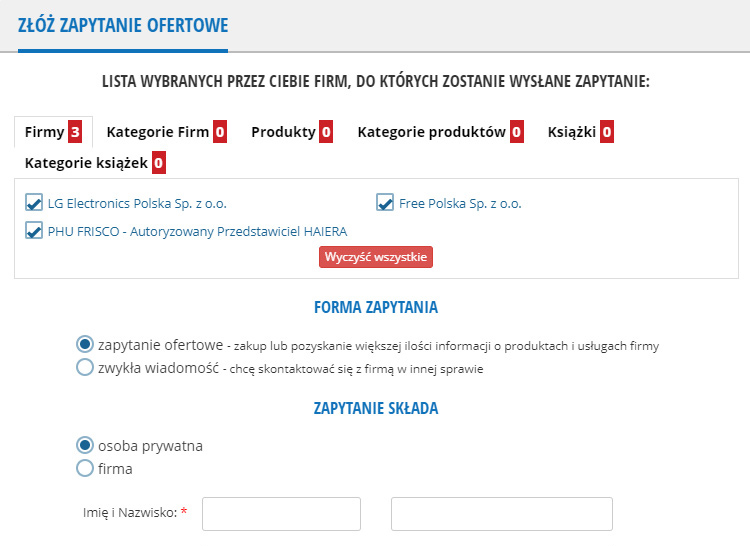
6. Włączy się formularz składania zapytania.
Miejsca, do których składasz zapytania zostały podzielone na zakładki. Na czerwono podświetlone są liczby wybranych firm, produktów itd. Tutaj możesz jeszcze dokonać zmian wyboru.
Wpisz swoje zapytanie, podaj dane kontaktowe i wyślij.
7. My roześlemy Twoje zapytanie do wybranych przez Ciebie firm, a Ty czekaj na odpowiedzi.
8. Chcesz złożyć zapytanie? Kliknij tutaj i wpisz czego szukasz.


