 Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Autor: Kabziński Jacek, Mosiołek Przemysław
Wydawnictwo: Wydawnictwo Naukowe PWN
Stron: 257
Data wydania: 2018-02-01
Typ: książka
Druk: tak
Wersja elektroniczna: nie
ISBN:
978-8-30-119697-4
01-02-2018
16.5 x 23.5 cm
nie
nie
nie
To unikatowa na polskim rynku wydawniczym publikacja traktująca o skutecznych metodach projektowania nieliniowych układów sterowania, które mogą być stosowane w automatyce przemysłowej, robotyce, sterowaniu ruchem i w wielu innych obszarach automatyki.
Początkowe rozdziały zawierają starannie zebrany i skondensowany materiał z zakresu stabilności układów nieliniowych, który mieści się w standardzie kształcenia na studiach II stopnia kierunków typu Automatyka i Robotyka. Kolejne rozdziały prezentują metody projektowania, które mogą być z powodzeniem przyswojone przez studentów wyższych lat, a stosowane i twórczo rozwijane przez doktorantów, naukowców i projektantów układów sterowania.
Wybrane metody sterowania nieliniowego są omówione w wyczerpujący, monograficzny sposób, a część rozdziałów zawiera wyniki całkowicie oryginalne i nigdy niepublikowane. Szczególny nacisk położono na aspekty praktycznego zastosowania proponowanych metod sterowania nieliniowego.
Adresatami książki są studenci studiów drugiego stopnia kierunku automatyka i robotyka oraz kierunków pokrewnych jak mechatronika, dyplomanci oraz doktoranci zajmujący się zagadnieniami sterowania nieliniowego, a także inżynierowie i projektanci układów sterowania, którzy coraz częściej dostrzegają szansę uzyskania przewagi konkurencyjnej swoich firm i zespołów, dzięki zastosowaniu metod sterowania nieliniowego. Książka może być także interesująca dla słuchaczy studiów doktoranckich i badaczy związanych z matematyką stosowaną oraz z ekonomią, w której zaniedbywane wcześniej modele nieliniowe w ostatniej dekadzie zaczęły cieszyć się rosnącą popularnością.
Przedmowa
Wprowadzenie
I. Stabilność nieliniowych układów dynamicznych
1. Nieliniowe układy dynamiczne, punkty równowagi i stabilność
2. Bezpośrednia metoda Lapunowa – układy stacjonarne
2.1. Podstawowe twierdzenie o stabilności
2.2. Twierdzenie o globalnej stabilności asymptotycznej i wyznaczanie zbioru przyciągania
2.3. Modyfikacje bezpośredniej metody Lapunowa w przypadku półokreślonej pochodnej systemowej
2.4. Zastosowanie funkcji majoryzujących
2.5. Bezpośrednia metoda Lapunowa dla układów liniowych
3. Bezpośrednia metoda Lapunowa – układy niestacjonarne i uogólnienia
3.1. Podstawowe twierdzenie o stabilności układów niestacjonarnych
3.2. Lemat Barbalata, twierdzenie LaSalle’a-Yoshizawy, jednostajna ograniczoność trajektorii
II. Metody projektowania nieliniowych układów sterowania
4. Idea projektowania sterowania z wykorzystaniem bezpośredniej metody Lapunowa
4.1. Bezpośrednia metoda Lapunowa w analizie stabilności układów
4.2. Sterująca funkcja Lapunowa
4.3. Reprezentacja niepewności w modelu obiektu – układy odporne i adaptacyjne
4.4. Projektowanie z wykorzystaniem funkcji Lapunowa dla układu nominalnego
4.5. Od projektowania z wykorzystaniem funkcji Lapunowa dla układu nominalnego do rekursywnego tworzenia funkcji Lapunowa
5. Adaptacyjne nadążanie za modelem
5.1. Liniowy układ adaptacyjny nadążający za liniowym modelem odniesienia
5.2. Nieliniowy układ adaptacyjny nadążający za liniowym modelem odniesienia
5.2.1. Nadążanie za modelem w układach wielowejściowych
5.2.2. Klasyczne prawo adaptacji
5.2.3. Sprzężenie zwrotne w prawie adaptacji
5.2.4. Dynamiczne sprzężenie zwrotne w prawie adaptacji
5.2.5. Rzutowanie adaptowanych parametrów na zbiór ograniczeń
5.3. Nieliniowy układ adaptacyjny nadążający za nieliniowym modelem z liniowym modelem pośrednim
6. Algorytm „kroków wstecz”
6.1. Podstawowe etapy algorytmu „kroków wstecz”
6.2. Algorytm „kroków wstecz” w układzie drugiego rzędu
6.3. Ogólna postać algorytmu „kroków wstecz”
6.4. Korzystne nieliniowości
7. Adaptacyjny algorytm „kroków wstecz”
7.1. Adaptacyjny algorytm „kroków wstecz” dla układu dwuwymiarowego
7.2. Wprowadzenie funkcji strojących
7.3. Ogólna postać adaptacyjnego algorytmu „kroków wstecz” z funkcjami strojącymi
7.4. Odporne prawa adaptacji
7.4.1. σ-modyfikacja prawa adaptacji
7.4.2. e-σ-modyfikacja prawa adaptacji
7.4.3. Prawa adaptacji z rzutowaniem
7.4.4. Przykład
7.5. Sterowanie odporne
8. Adaptacyjny algorytm „kroków wstecz” z filtracją funkcji stabilizujących
8.1. Algorytm „kroków wstecz” z filtracją funkcji stabilizujących
8.2. Inne rozwiązania filtrów obliczających pochodne
8.3. Odporne prawa adaptacji
8.3.1. σ-modyfikacja prawa adaptacji
8.3.2. e-σ-modyfikacja prawa adaptacji
8.3.3. Prawa adaptacji z rzutowaniem
9. Adaptacyjny algorytm „kroków wstecz” z przybliżonym różniczkowaniem funkcji stabilizujących
III. Praktyczne aspekty projektowania nieliniowych układów sterowania
10. Układy z ograniczonym sterowaniem i nieznany współczynnik wzmocnienia sterowania
10.1. Ograniczenie sygnału sterującego a realizacja celów sterowania
10.2. Adaptacyjny algorytm „kroków wstecz” z ograniczeniem sterowania
10.3. Nieznany współczynnik wzmocnienia sterowania
10.4. Łączenie różnych technik projektowania metodą „kroków wstecz”
11. Układy nieliniowe względem zmiennych w czasie parametrów
11.1. Założenia o liniowości układu względem stałych parametrów
11.2. Odporna stabilizacja metodą „kroków wstecz”
12. Adaptacyjny algorytm „kroków wstecz” z ograniczeniami wyjścia i zmiennych stanu
12.1. Barierowe funkcje Lapunowa
12.2. Algorytm „kroków wstecz” z ograniczeniem wyjścia
12.3. Algorytm „kroków wstecz” z ograniczeniem wszystkich zmiennych stanu
Dodatki
D1. Wektory, macierze i normy – przydatne nierówności i tożsamości
D2. Ciągłość, różniczkowalność i równania różniczkowe
D3. Operator rzutowania
Zestawienie przykładów
Słownik terminów stosownych w książce
Bibliografia
W naszym serwisie możesz złożyć zapytanie do wielu firm.
Zapytanie możesz wysłać bezpośrednio do firmy lub o wybrany produkt a nawet całą kategorię produktów.
Poniżej w kilku krokach pokazujemy jak wysłać zapytanie.

1. Skorzystaj z wyszukiwarki wpisując czego szukasz.
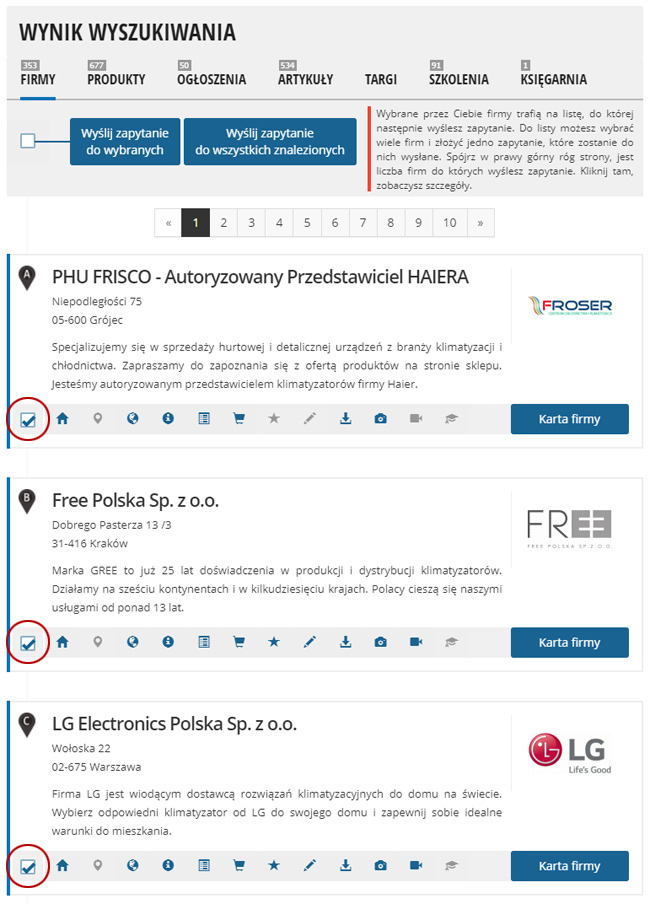
2. Zaznacz na liście wyniku wyszukiwania wybrane pozycje.
Możesz także wejść bezpośrednio do katalogu firm lub katalogu produktów i dokonać wyboru.

3. Twój wybór będzie pokazany w górnym pasku portalu. Najedź myszką i kliknij.
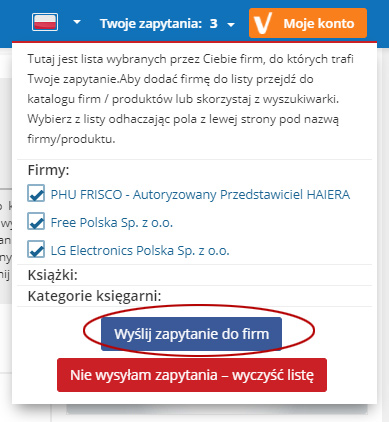
4. Następnie kliknij przycisk „Wyślij zapytanie do firm”.
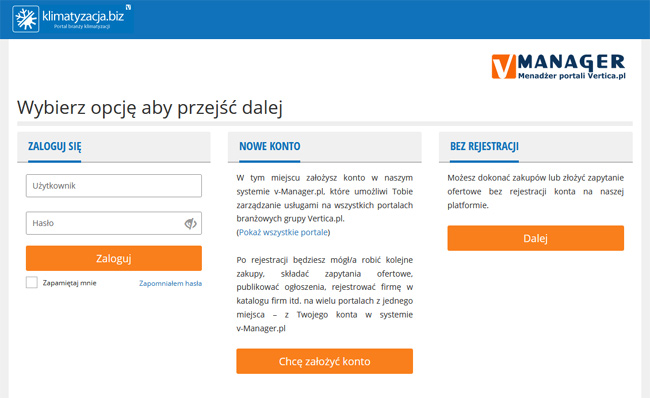
5. Jeżeli nie jesteś zalogowany to włączy się strona z możliwością wyboru w jaki sposób chcesz korzystać z serwisu.
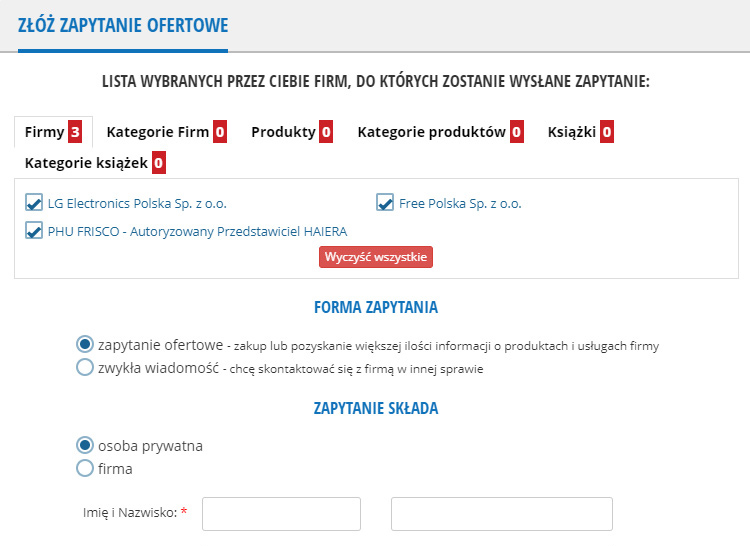
6. Włączy się formularz składania zapytania.
Miejsca, do których składasz zapytania zostały podzielone na zakładki. Na czerwono podświetlone są liczby wybranych firm, produktów itd. Tutaj możesz jeszcze dokonać zmian wyboru.
Wpisz swoje zapytanie, podaj dane kontaktowe i wyślij.
7. My roześlemy Twoje zapytanie do wybranych przez Ciebie firm, a Ty czekaj na odpowiedzi.
8. Chcesz złożyć zapytanie? Kliknij tutaj i wpisz czego szukasz.


